
发布 | Coral-Data开源计划第4期:SimTerrain-Highway1 for SCANeR 仿真静态场景数据集

Coral-Data(珊瑚数据)开源计划着眼当下智能驾驶行业对算法训练及仿真测试应用的迫切数据需求,将陆续发布系列仿真测试场景集和训练数据集。本期发布的SimTerrain-Highway1 for SCANeR【高速公路(1)】仿真静态场景数据集,依托真实高速公路道路情况制作而成,可用于测试和验证高速公路领航辅助系统等运行设计域在高速公路上的ADAS/ADS系统的性能和可靠性。
SimTerrain-Highway1 for SCANeR【高速公路(1)】仿真静态场景数据集具体包括了高速公路中常见的道路路况,如直道、弯道、坡道、立交、匝道、收费站、服务区等涵盖双向可行驶里程68km, 其中南北走向道路直线里程为22km,与立交、匝道相连的东西走向道路有2段,直线里程约为6km。场景集由3个真实高速公路地形拼接而成:


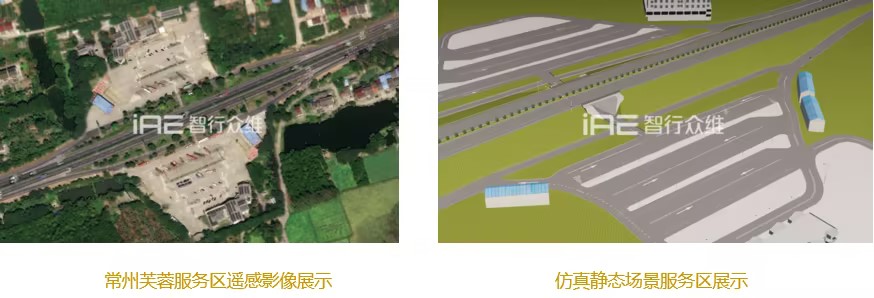
A段以小曲率弯道为主,包含一个双向可互通服务区。服务区内设置有多个停车区域,覆盖斜列、垂直、平行车位及全封闭、半封闭和开口的车位线类型。该服务区以该段高速上的真实服务区为搭建依据,路段为服务区前后延伸的高速路段。
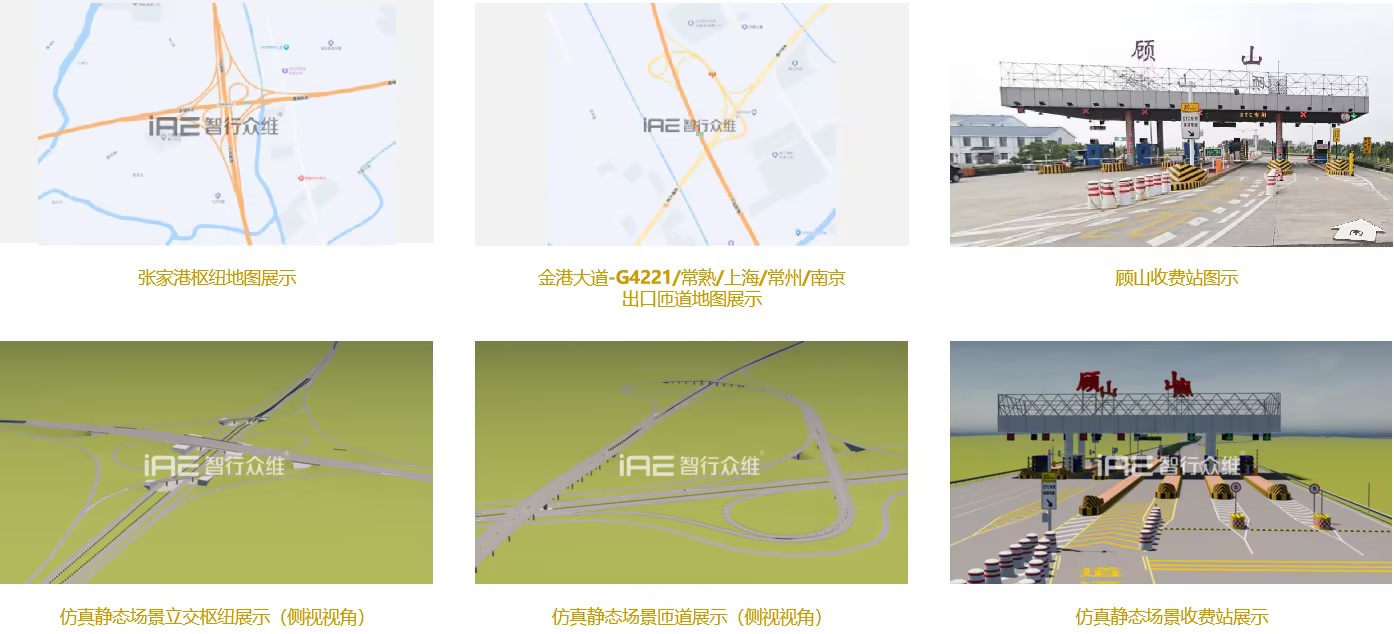
B段以坡道、立交枢纽、匝道为主,包含一个四方向立交枢纽、一块大小曲率匝道区域、一个收费站,每个方向多为两个行车道和一个应急车道,中间设有树木隔离。该四方向立交枢纽以该段高速上的某典型枢纽为搭建依据。
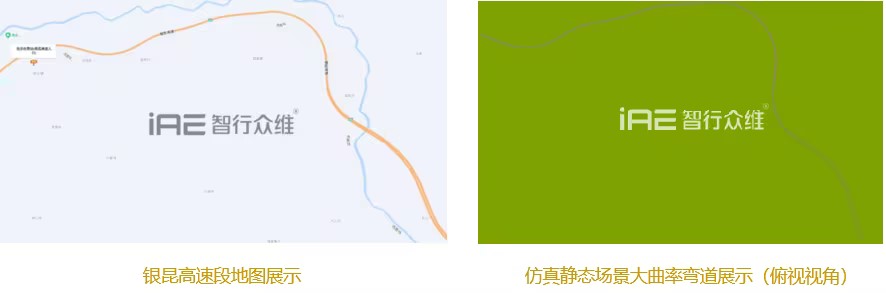
C段以大曲率弯道为主,范围内每个行驶方向多为两个行车道和一个应急车道,高程起伏较小,以缓坡为主。该路段以某高速路段入口至某大桥路段为搭建依据。
下载方式
https://gitee.com/iae-icv/coral-data