
直播回顾 | L3级自动驾驶系统的SOTIF最佳实践和工作框架
2024年1月31日,IAE智行众维有幸邀请到国际顶尖的SOTIF专家Mr. Pang SungHoon进行 “L3级自动驾驶系统的SOTIF最佳实践和工作框架”直播讲座。
随着L3级自动驾驶技术的快速发展,预期功能安全问题日益凸显其重要性。尽管ISO 26262标准提高了汽车上路的安全性,但预期功能安全(SOTIF)仍占据着事故风险中的很大一部分。因此,建立SOTIF最佳实践和工作框架显得尤为重要。
基于目前的市场需求,此次直播从预期功能安全标准的历史和概念出发,探讨L3级自动驾驶系统SOTIF设计的关键方法论,并基于危险行为和触发条件看SOTIF测试的接受里程数,同时建立基于新型自动驾驶车辆量产里程碑的SOTIF方法论及指导准则。
关于预期功能安全(SOTIF)
预期功能安全(SOTIF),主要用于解决自动驾驶由于性能局限、规范定义不足及可预见的人员误用带来的整车危险,最大程度上规避自动驾驶汽车安全风险。而如何定义这部分风险并且将这部分风险降低到合理可接受的水平,是SOTIF研究的范畴。
SOTIF专家Mr. Pang SungHoon
Mr. Pang拥有24年自动驾驶系统工程经验,15年的功能安全开发经验以及7年的SOTIF开发经验,曾经在一汽、华为、GM、Nissan、TAKATA、DNV等公司从事预期功能安全以及功能安全相关工作,不仅是全球公认的自动驾驶预期功能安全专家、自动驾驶功能安全专家以及自动驾驶系统设计和测试专家,更是全球为数不多的,真正具备量产项目SOTIF工程开发经验的国际顶尖专家。
以下是直播精彩片段回顾:
01.SOTIF标准及相关标准的历史与概念

本次直播课从预期功能安全(SOTIF)的标准发展史开始,对包括IEC 61508、ISO 26262以及未来会进行发布的标准如ISO 26262第三版和针对AI算法安全性的ISO 8800等进行了简单介绍,围绕不同自动驾驶等级(L0-L5)中功能安全和预期功能安全的重要性及关注点进行展开讨论。
02.自动驾驶系统(L3)SOTIF设计的关键方法
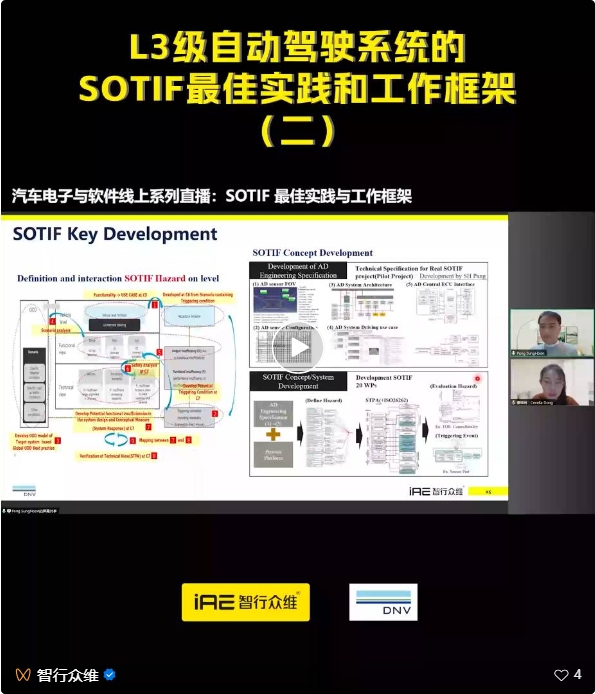
该部分聚焦于自动驾驶系统功能安全与预期功能安全的关键开发步骤和考虑因素。对功能安全和预期功能安全的关键开发步骤进行了深入分析,从动力底盘域、车身域到智能驾驶域进行多维度解析。挖掘安全假设与约束的重要性,逐一剖析阶段性活动。
03.从危险行为和触发条件看SOTIF的接受里程数
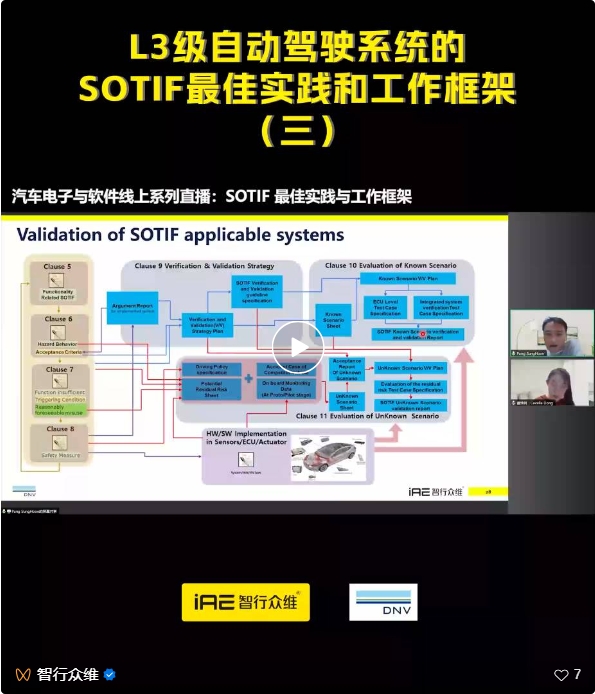
此部分主要介绍自动驾驶系统中的安全问题,特别是系统安全,分为动态驾驶任务(DDT)和人为误用两类场景。在安全目标框架下,重点在于分析正常条件和触发条件下的安全风险,以及如何针对每一条危害行为导出最终可接受风险准则,进而确认SOTIF的测试接受里程数。
04.基于ADS汽车量产里程碑的SOTIF方法指南
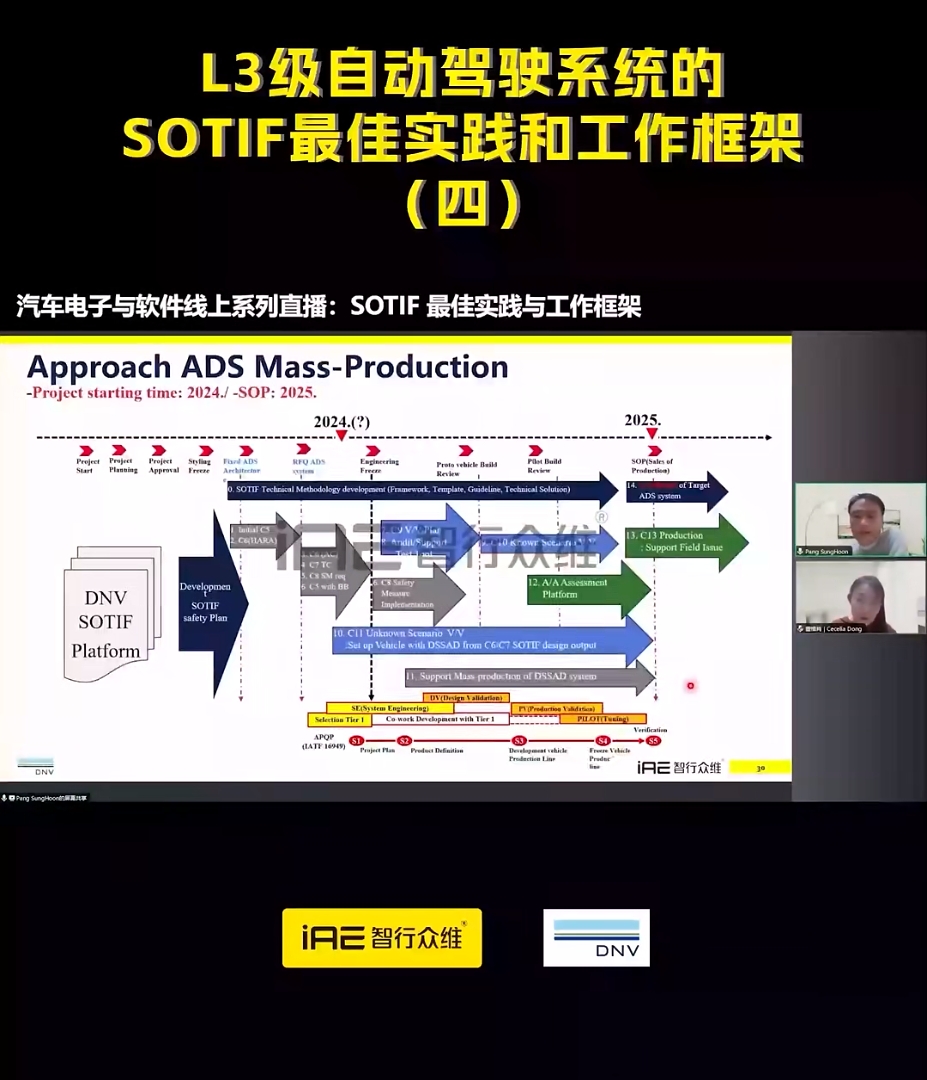
自动驾驶系统开发需经历设计、测试验证、审核评估至量产阶段。设计阶段需明确输出设计准则,测试环节需改造工具支持仿真与实车测试,并通过整车级测试反馈优化,主机厂应取得流程认证,确保符合方法论和技术指导。
本次直播得到了行业内众多同仁的热情参与和高度认可,未来IAE智行众维也将持续为行业客户提供预期功能安全端到端的咨询、工程开发、专项培训等服务,并可以提供功能安全和预期功能安全的融合流程搭建和流程认证服务,赋能L3及以上自动驾驶功能安全和预期功能安全开发,为L3及以上自动驾驶车型的量产和整车出口计划提供更大助力!