
发布 | Coral-Data开源计划第10期:SimTerrain-City1 for OpenDRIVE仿真静态场景数据集
本期发布“SimTerrain-City1 for OpenDRIVE仿真静态场景数据集”。该仿真静态场景提供OpenDRIVE v1.4版本的路网成果,支持在多种仿真平台上使用。

扫码即刻下载
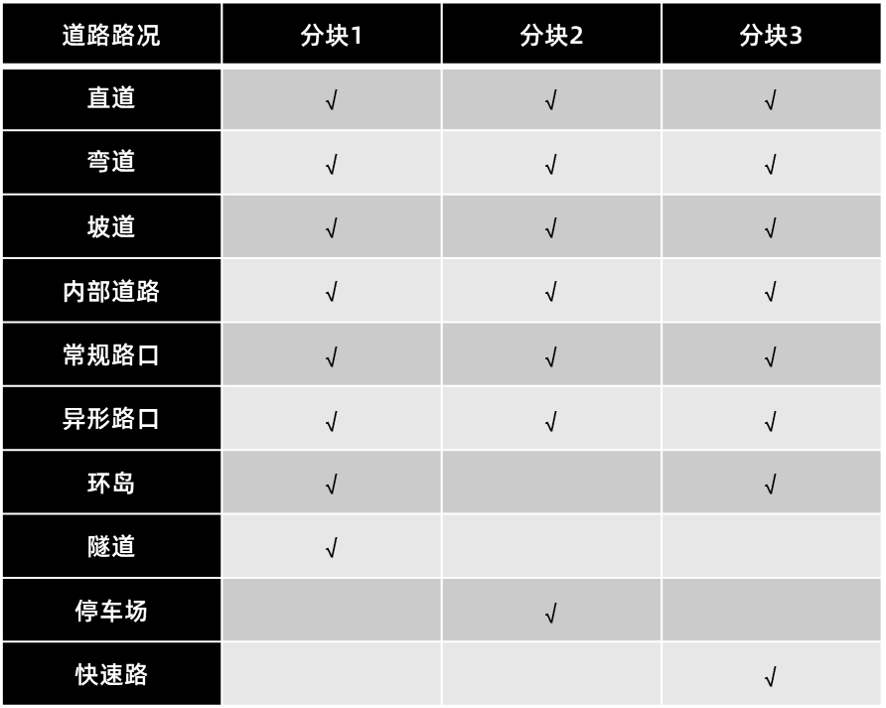
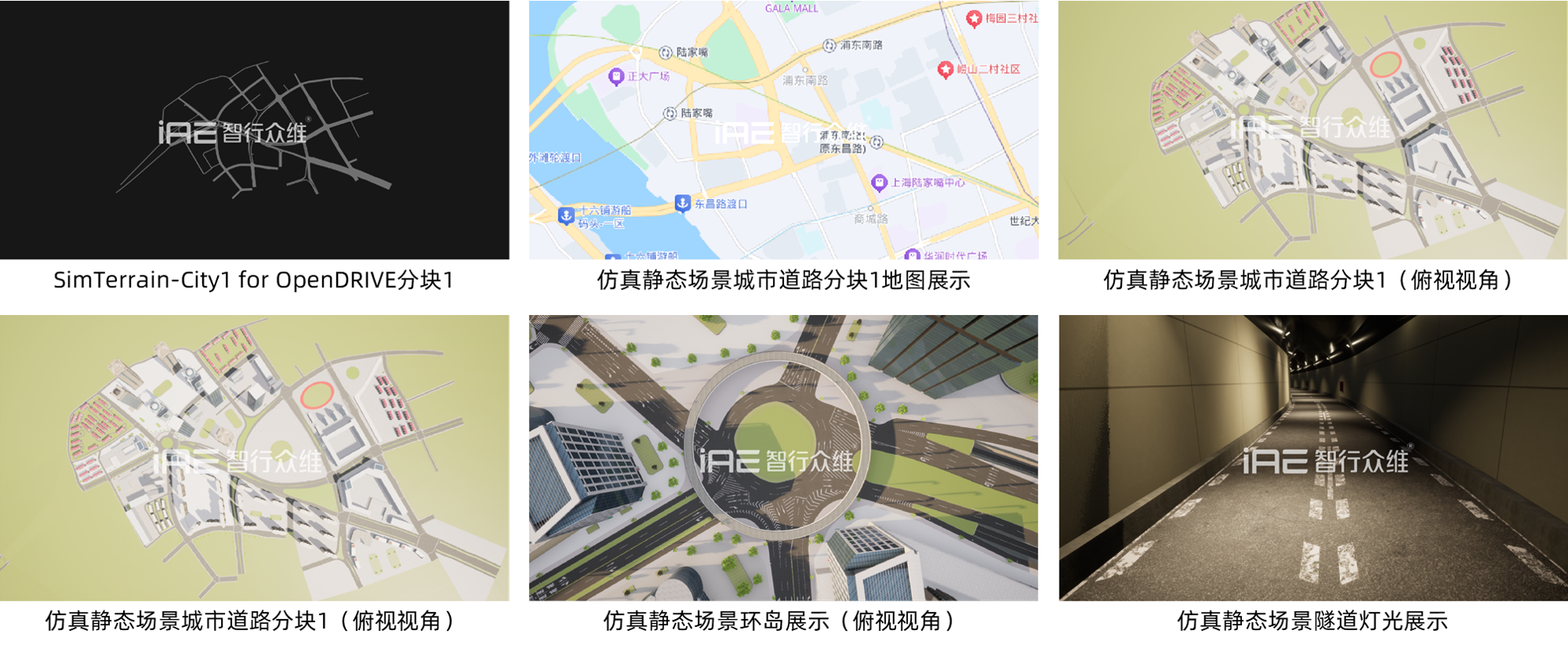
SimTerrain-City1 for OpenDRIVE仿真静态场景依据国家标准、行业标准(以下简称国标、行标)对城市道路要求结合中国上海道路形态制作而成,可用于测试和验证城市道路领航辅助系统等运行设计域在城市道路上的ADAS/ADS系统的性能和可靠性。设计了城市道路中常见的道路路况,如直道、弯道、坡道、环岛、隧道、各样路口等,用于ADAS/ADS系统仿真测试或驾驶模拟器应用测试。相比于实车测试,仿真测试可以减少成本,因为不需要实际的车辆和物理环境,同时可以快速更改测试条件。
静态场景介绍
SimTerrain-City1 for OpenDRIVE通过3个中国真实城市地形拼接而成,为保证地形测试的完整性,道路之间存在重叠区域。

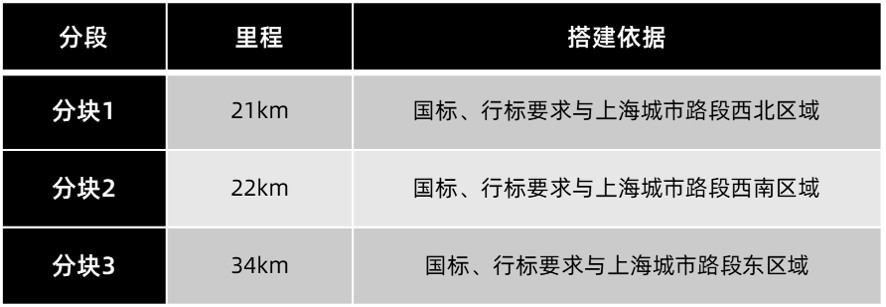
分块1
由城市环岛、隧道、多种异形路口、上下坡直道和上下坡弯道组成,全图全长约双向21km:
- 东西走向:包含2条主干道路,里程分别为双向1.5km和2km,其中双向1.5km直道与隧道相连,隧道双向长度约为3km;
- 南北走向:包含2条主干道路,里程分别为双向2.2km和2.4km。
其中
- 城市环岛:由6条主干道交会而成,隧道位于环岛下方;
- 道路数量:包含单向车道、双向车道、多转少车道、少转多车道;
- 道路中间:设有城市护栏或中央隔离带分隔;
- 夜间亮灯效果:有。
分块2
以停车场、直道为主,包含停车场、上下坡直道、各样路口等,全图全长约双向22km:
- 东西走向:包含2条主干道,里程分别为双向2km和1.6km,其中双向1.6km直道与停车场相连,停车场面积约为14400平方米;
- 南北走向:包含2条主干道,里程分别为双向3.4km和3.8km。

其中
- 停车场:内部有多个停车区域,覆盖斜列、垂直、平行车位及全封闭、半封闭和开口的车位线类型,设置数字、字母、文字、箭头等多种路面元素;
- 道路数量:包含单向车道、双向车道、多转少车道、少转多车道;
- 道路中间:设有城市护栏或中央隔离带分隔;
- 夜间亮灯效果:有。
分块3
以城市直路为主,全图全长约双向34km:
- 东西走向:包含2条主干道,里程分别为双向2km和8.2km;其中双向8.2km直道包含城市快速路,里程约双向4.8km;
- 南北走向:包含2条主干道,里程分别为双向5.7km和5.5km。
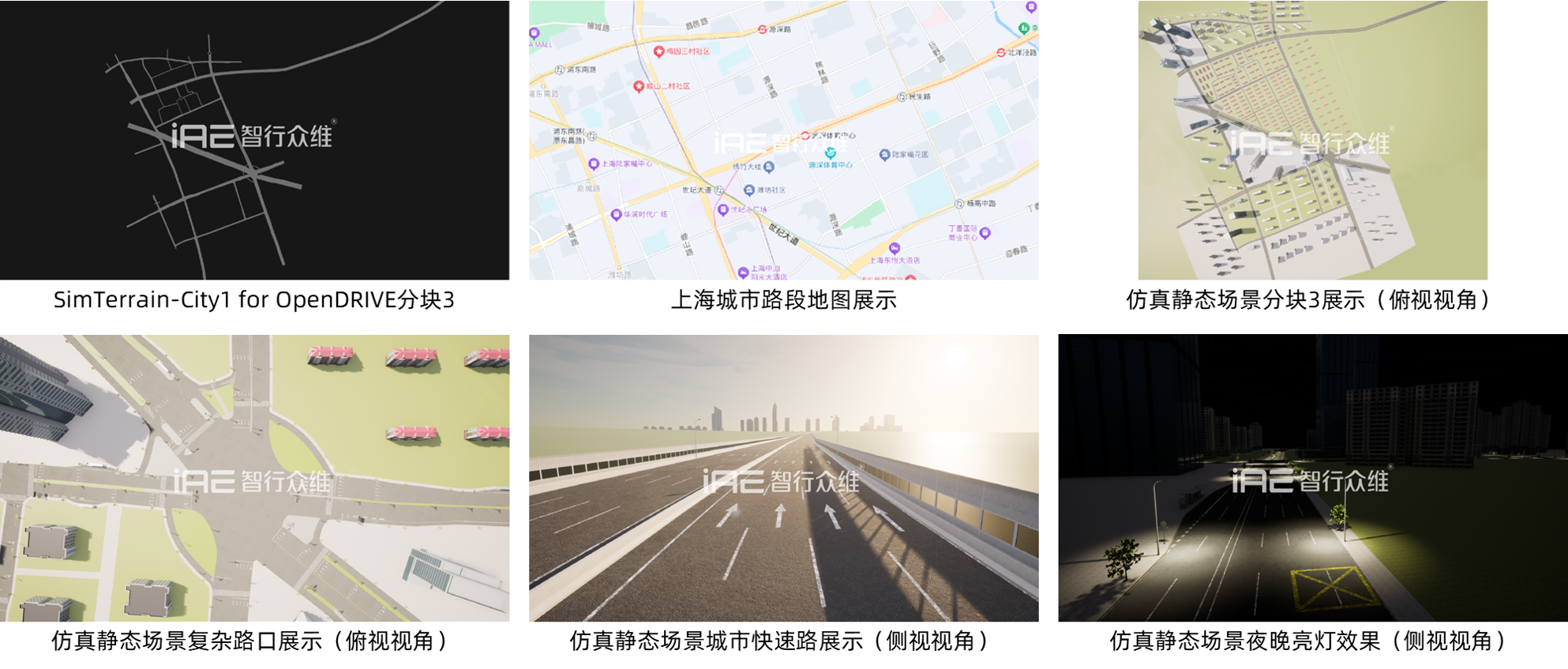
其中
- 道路类型:包含城市道路、城市快速路和内部道路;
- 路口形态:包含复杂程度高、红绿灯逻辑多样的路口、常见路口和异形路口;
- 路口设置:3D立体样式路面标识及斑马线;
- 车道类型:包含机动车道、非机动车道和公交专用道;
- 车道数量:包含单车道、双车道、多转少车道和少转多车道;
- 夜间亮灯效果:有。
场景生产说明
– 交通标志和标线:静态场景为虚拟地理位置,因此交通标线和交通标志的布设以国标、行标为基础,参考真实地形添加样式,尺寸以国标《GB 5768 ?道路交通标志和标线》为依据。
- 交通标线:包含车道标线、导流线、车距确认线、减速振荡标线等;
- 交通标志:包含指路标牌、禁令标牌、警告标牌、告示标牌等。
-道路高程:搭建静态场景的参考数据(OpenStreetMap、百度街景)缺失相对高程信息,因此静态场景的高程主要参考百度街景的坡度视觉效果做还原(保证上坡和下坡的一致性),坡度值参考国标进行设置。
下载方式
https://gitee.com/iae-icv/coral-data